
Locators
AdonisFX Locators are visualizers that are meant for visualizing and measuring transform nodes which provide valuable input information for setting up the deformers. They can visualize information representing position, distance, or angle as well as velocities or accelerations represented via coloring when used in combination with Sensors.
AdnLocatorPosition
AdnLocatorPosition is the locator for visualizing the position of a single transform node. When connected to its corresponding AdnSensorPosition, velocity or acceleration can be visualized with a color code blue-to-red.
How To Use
An AdnLocatorPosition will only visualize the information of the transform node to which it is applied. To be able to read, process and visualize information like the velocity or acceleration an AdnSensorPosition has to be applied.
Only one transform will be required to create the AdnLocatorPosition. The creation process is the following:
- Go to the geometry context of the rig containing the rig setup to which the locators should be applied.
- Press TAB and navigate to the submenu AdonisFX > Locators to find the AdnLocatorPosition
 SOP type.
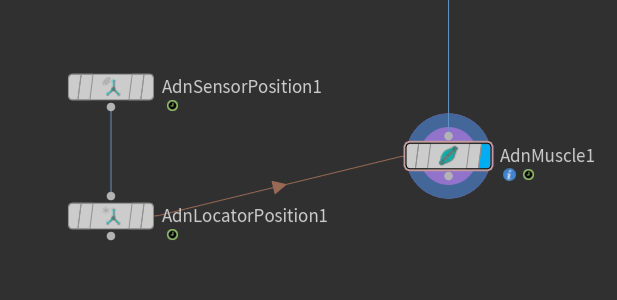
SOP type. - Create it and connect the AdnSensorPosition sensor to its input for visualization purposes.
- Go to the AdnLocatorPosition's Input tab and select the transform nodes from which to extract the transformation from (e.g. joints, null nodes, rivets, etc). Use the "Operator Chooser" in the locator's UI to select the correct target node containing transform information. Generally these input nodes will be located on the /obj level as a null, joint or rivet.
- Adjust the Draw Output and Scale to visualize activations and scale the visualizer for the locator.
- The AdnLocatorPosition is created and ready to be used.
- Activation values are output from the sensor nodes via detail attributes (
adnActivationVelocityandadnActivationAcceleration). It is to note that these attribute names are expected by the locator nodes and their name should not be altered.- When connecting the sensors to a muscle or an activation node for example it is advisable to first connect the sensor to its corresponding locator and use the locator node as reference for creating the detail expression connection.
- To create a connection to the muscle use a detail expression on the muscle's parameter (for example the activation parameter) in the form of:
detail("/obj/geo1/AdnLocatorPosition1", "adnActivationVelocity", 0)pointing directly to the locator that is connected to the sensor. This will allow for the muscle nodes to pick up the detail activation attribute from the sensor connection.
Attributes
Input
| Name | Type | Default | Animatable | Description |
|---|---|---|---|---|
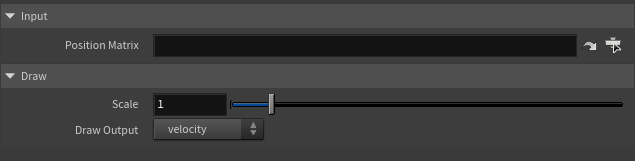
| Position Matrix | Matrix | Identity | ✓ | Matrix containing the position in world space of the transform node. This entry is an operator path pointing to nodes that contain transform information to drive the locator. These nodes are generally exposed on the /obj level. |
Draw
| Name | Type | Default | Animatable | Description |
|---|---|---|---|---|
| Scale | Float | 1.0 | ✓ | Sets the scaling factor applied to the position locator visualizer. Has a range of [0.0, 10.0]. The upper limit is soft, higher values can be used. |
| Draw Output | Enumerator | Velocity | ✓ | Selects the property of the locator to be visualized on the locator visualizer.
|
Activation Values
| Name | Type | Default | Animatable | Description |
|---|---|---|---|---|
| Velocity | Float | 0.0 | ✓ | Magnitude of the velocity of the transform node. The expected detail attribute on the input of the locator node is adnActivationVelocity and can be visualized with the "velocity" draw output. |
| Acceleration | Float | 0.0 | ✓ | Magnitude of the acceleration of the transform node. The expected detail attribute on the input of the locator node is adnActivationAcceleration and can be visualized with the "acceleration" draw output. |
Parameter Template
AdnLocatorDistance
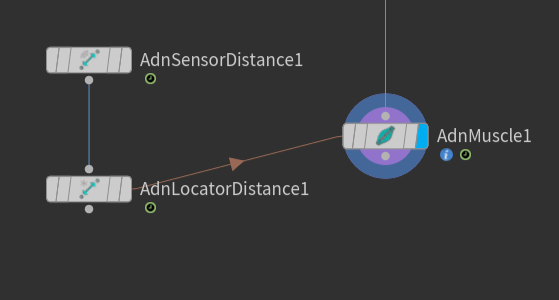
AdnLocatorDistance is the locator for visualizing the distance between two transform nodes. When connected to its corresponding AdnSensorDistance, distance, velocity or acceleration can be visualized with a color code blue-to-red.
How To Use
An AdnLocatorDistance will only visualize the information of the distance between two transform nodes to which it is applied. To be able to read, process and visualize information like the distance magnitude, velocity or acceleration an AdnSensorDistance has to be applied.
Two transform nodes will be required to create an AdnLocatorDistance representing each extremity. The creation process is the following:
- Go to the geometry context of the rig containing the rig setup to which the locators should be applied.
- Press TAB and navigate to the submenu AdonisFX > Locators to find the AdnLocatorDistance
 SOP type.
SOP type. - Create it and connect the AdnSensorDistance sensor to its input for visualization purposes.
- Go to the AdnLocatorDistance's Input tab and select the transform nodes from which to extract the transformation from (e.g. joints, null nodes, rivets, etc). Use the "Operator Chooser" in the locator's UI to select the correct target node containing transform information. Generally these input nodes will be located on the /obj level as a null, joint or rivet.
- Adjust the Draw Output and Scale to visualize activations and scale the visualizer for the locator.
- The AdnLocatorDistance is created and ready to be used.
- Activation values are output from the sensor nodes via detail attributes (
adnActivationDistance,adnActivationVelocityandadnActivationAcceleration). It is to note that these attribute names are expected by the locator nodes and their name should not be altered.- When connecting the sensors to a muscle or an activation node for example it is advisable to first connect the sensor to its corresponding locator and use the locator node as reference for creating the detail expression connection.
- To create a connection to the muscle use a detail expression on the muscle's parameter (for example the activation parameter) in the form of:
detail("/obj/geo1/AdnLocatorDistance1", "adnActivationDistance", 0)pointing directly to the locator that is connected to the sensor. This will allow for the muscle nodes to pick up the detail activation attribute from the sensor connection.
Attributes
Input
| Name | Type | Default | Animatable | Description |
|---|---|---|---|---|
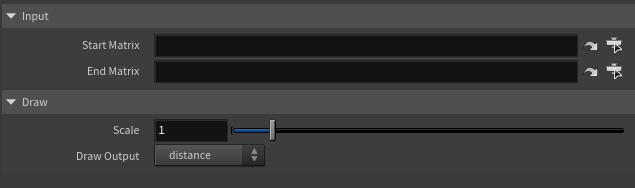
| Start Matrix | Matrix | Identity | ✓ | Matrix containing the position in world space of the first transform node. This entry is an operator path pointing to nodes that contain transform information to drive the locator. These nodes are generally exposed on the /obj level. |
| End Matrix | Matrix | Identity | ✓ | Matrix containing the position in world space of the second transform node. This entry is an operator path pointing to nodes that contain transform information to drive the locator. These nodes are generally exposed on the /obj level. |
Draw
| Name | Type | Default | Animatable | Description |
|---|---|---|---|---|
| Scale | Float | 1.0 | ✓ | Sets the scaling factor applied to the distance locator visualizer. Has a range of [0.0, 10.0]. The upper limit is soft, higher values can be used. |
| Draw Output | Enumerator | Distance | ✓ | Selects the property of the locator to be visualized on the locator visualizer.
|
Activation Values
| Name | Type | Default | Animatable | Description |
|---|---|---|---|---|
| Distance | Float | 0.0 | ✓ | Magnitude of the distance between the transform nodes. The expected detail attribute on the input of the locator node is adnActivationDistance and can be visualized with the "distance" draw output. |
| Velocity | Float | 0.0 | ✓ | Magnitude of the velocity between the transform nodes. The expected detail attribute on the input of the locator node is adnActivationVelocity and can be visualized with the "velocity" draw output. |
| Acceleration | Float | 0.0 | ✓ | Magnitude of the acceleration between the transform nodes. The expected detail attribute on the input of the locator node is adnActivationAcceleration and can be visualized with the "acceleration" draw output. |
Parameter Template
AdnLocatorRotation
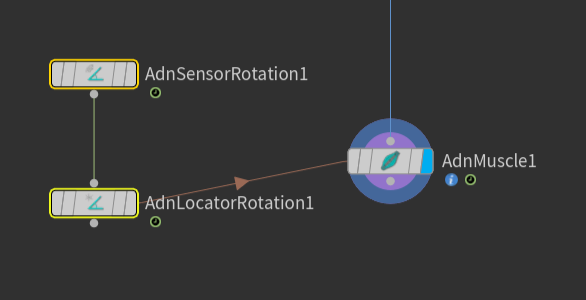
AdnLocatorRotation is the locator for visualizing the angle between three transform nodes. When connected to its corresponding AdnSensorRotation, angle, angular velocity or angular acceleration can be visualized with a color code blue-to-red.
How To Use
An AdnLocatorRotation will only visualize the information of the connections and angle between the three transform nodes. To be able to read, process and visualize information like the angle, angular velocity or angular acceleration an AdnSensorRotation has to be applied.
Three transform nodes will be required to create the AdnLocatorRotation. The creation process is the following:
- Go to the geometry context of the rig containing the rig setup to which the locators should be applied.
- Press TAB and navigate to the submenu AdonisFX > Locators to find the AdnLocatorRotation
 SOP type.
SOP type. - Create it and connect the AdnSensorRotation sensor to its input for visualization purposes.
- Go to the AdnLocatorRotation's Input tab and select the transform nodes from which to extract the transformation from (e.g. joints, null nodes, rivets, etc). Use the "Operator Chooser" in the locator's UI to select the correct target node containing transform information. Generally these input nodes will be located on the /obj level as a null, joint or rivet.
- Adjust the Draw Output and Scale to visualize activations and scale the visualizer for the locator.
- The AdnLocatorRotation is created and ready to be used.
- Activation values are output from the sensor nodes via detail attributes (
adnActivationRotation,adnActivationVelocityandadnActivationAcceleration). It is to note that these attribute names are expected by the locator nodes and their name should not be altered.- When connecting the sensors to a muscle or an activation node for example it is advisable to first connect the sensor to its corresponding locator and use the locator node as reference for creating the detail expression connection.
- To create a connection to the muscle use a detail expression on the muscle's parameter (for example the activation parameter) in the form of:
detail("/obj/geo1/AdnLocatorRotation1", "adnActivationRotation", 0)pointing directly to the locator that is connected to the sensor. This will allow for the muscle nodes to pick up the detail activation attribute from the sensor connection.
Attributes
Input
| Name | Type | Default | Animatable | Description |
|---|---|---|---|---|
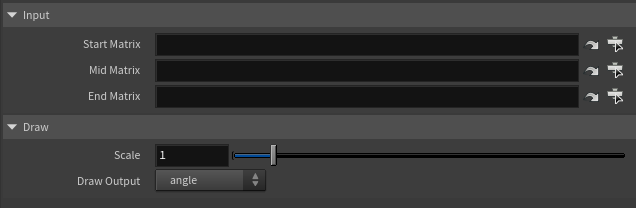
| Start Matrix | Matrix | Identity | ✓ | Matrix containing the position in world space of the first transform node. This entry is an operator path pointing to nodes that contain transform information to drive the locator. These nodes are generally exposed on the /obj level. |
| Mid Matrix | Matrix | Identity | ✓ | Matrix containing the position in world space of the second transform node. This entry is an operator path pointing to nodes that contain transform information to drive the locator. These nodes are generally exposed on the /obj level. |
| End Matrix | Matrix | Identity | ✓ | Matrix containing the position in world space of the third transform node. This entry is an operator path pointing to nodes that contain transform information to drive the locator. These nodes are generally exposed on the /obj level. |
Draw
| Name | Type | Default | Animatable | Description |
|---|---|---|---|---|
| Scale | Float | 1.0 | ✓ | Sets the scaling factor applied to the rotation locator visualizer. Has a range of [0.0, 10.0]. The upper limit is soft, higher values can be used. |
| Draw Output | Enumerator | Angle | ✓ | Selects the property of the locator to be visualized on the locator visualizer.
|
Activation Values
| Name | Type | Default | Animatable | Description |
|---|---|---|---|---|
| Angle | Float | 0.0 | ✓ | Magnitude of the angle between the three transform nodes. The expected detail attribute on the input of the locator node is adnActivationAngle and can be visualized with the "angle" draw output. |
| Velocity | Float | 0.0 | ✓ | Magnitude of the angular velocity between the three transform nodes. The expected detail attribute on the input of the locator node is adnActivationVelocity and can be visualized with the "velocity" draw output. |
| Acceleration | Float | 0.0 | ✓ | Magnitude of the angular acceleration between the three transform nodes. The expected detail attribute on the input of the locator node is adnActivationAcceleration and can be visualized with the "acceleration" draw output. |
Parameter Template
Connections
Connections in AdonisFX for Houdini should be handled in two ways:
- Detail expression:
detail("/obj/geo1/L_adnLocatorRotation_armFlexionShape", "adnActivationRotation", 0)where the first component should contain an API compliant naming convention and the second the detail attribute name that some of the AdonisFX SOP nodes output. This should be used when the requirement is for the connected geometry to cook before retrieving the detail attribute. This could be used for example to drive a parameter of the node using the activation value output from a sensor/locator. - Channel expression:
ch("../AdnMuscle1/envelope")where the first component should contain an API compliant naming convention and the second the referenced channel to the parameter name. This could be used to for example connect a float attribute to drive a parameter on the node.

